








Graupner SJ MZ-24功能介绍及滑翔机设置
by Li Han William
Graupner SJ MZ-24无线电遥控系统适用于固定翼、直升机、滑翔机及多旋翼飞行器,适合玩家的多样化需求。该遥控系统采用FHSS跳频技术,具备多达75个跳频通道,可有效防止外部干扰,提供先进的可靠性操作。
该遥控系统的一大亮点在于能为用户提供各种实用数据的实时信息,例如模型螺旋桨转速、接收机电压、动力电压、温度、GPS坐标、高度等,这些数据可通过接收机内置或另行安装的传感器装置获取。如使用Graupner SJ T系列电调,转速、动力电压、电流等信息无需外置传感器,可直接获取。

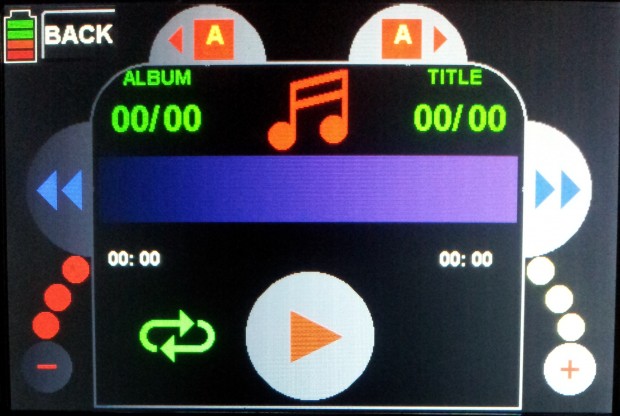
此外,该遥控系统配置一块3.5英寸的触摸屏,可通过触控及按键两种方式对遥控器进行设定。最特别的是,随遥控器自带的4G SD卡不但能够满足不同模型的设定存储,以及各项回传数据的记录,该卡还可存储MP3格式的音乐,在飞行时通过遥控器内置音响或音频口连接耳机播放。

该遥控系统的另一大特色在于完善的PC端软件,将遥控器通过USB线与电脑连接,该软件不仅可以对遥控器进行固件升级,还可进行实时回传数据的读取、处理和分析,该软件将为航模爱好者及开发人员提供极大的便利。

一、模型滑翔机基本设置
想要充分发挥一架遥控模型滑翔机的性能,其组装很关键,与此同时遥控器的设置与调整则起到决定性作用。接下来本文将就MZ-24的遥控滑翔机设置过程进行介绍。
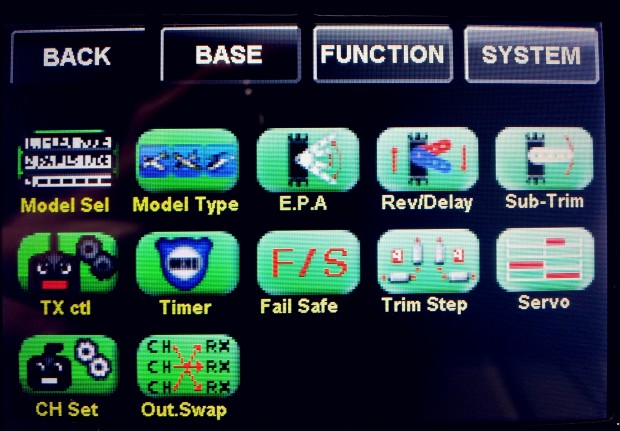
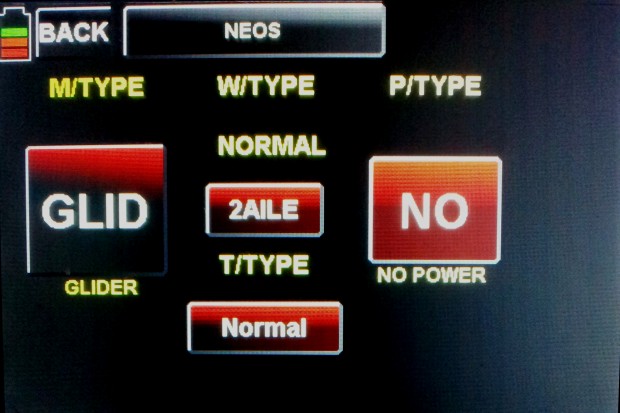
打开遥控器后,首先进入“BASE”界面,对模型类型进行选择。点击“Model Type”,进入模型类型菜单,选择“GLID”模式,接着对机翼类型进行选择,对于DLG模型滑翔机的机翼选择“2A”,其他带有襟翼的滑翔机则根据具体类型对应选择。对于尾翼类型,可选类型为“NOR”常规平尾、“V”V形尾翼、“2ELE”双升降舵机平尾。设置好机翼类型后,点击“P/TYPE”对动力类型进行选择,可选动力或无动力。
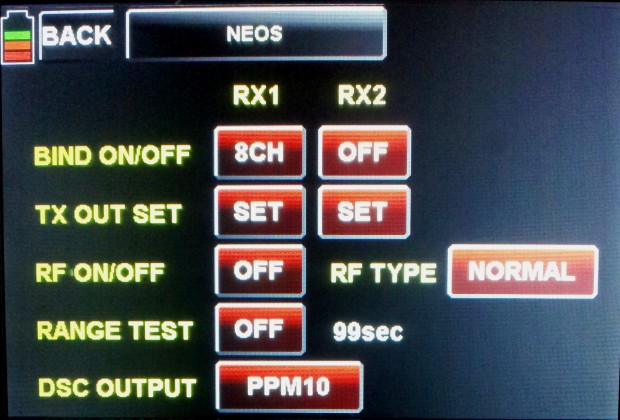
设置好模型类型后,进行接收机绑定,MZ-24的每个模型支持绑定双接收机,通常来讲只绑定对应单接收机即可。在“BASE”界面,可以看到“BIND ON/OFF”。绑定时,先对接收机通电,未绑定的接收机在通电后会有红指示灯闪烁,按住接收机上的“SET”按钮后,再按“RX1”下“BIND ON/OFF”的“OFF”开关,此时“OFF”会变为“CHK”,绑定完成后“CHK”会变为对应绑定接收机的通道数,此时绑定完成。
完成模型类型的选择与接收机绑定后,方可进入模型各舵机的调整及飞行模式的设置。
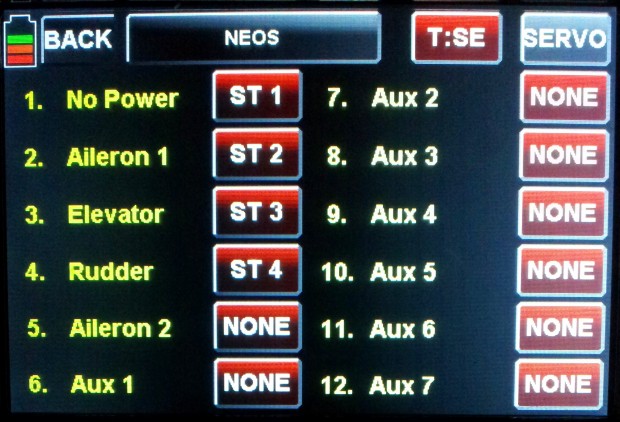
在“BASE”主界面,可以看到“CH Set”按钮,在此可对各舵面的输出通道及对应控制杆进行查看和修改。接下来按照“CH Set”内的通道顺序对各舵机与接收机进行连接,同时可根据个人喜好对各个舵面的摇杆进行重新定义。
完成接收机与舵机的连接后,进入各个舵面的调整。
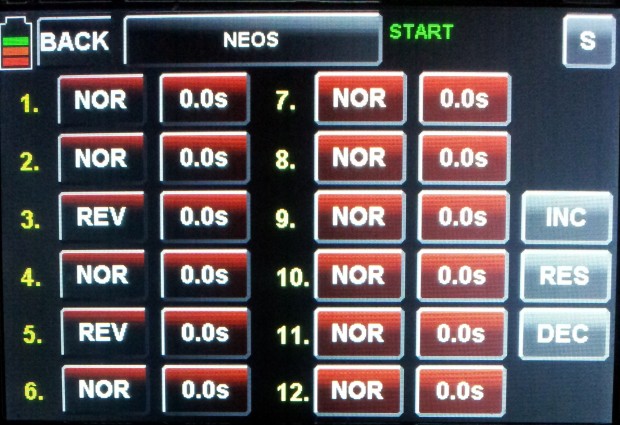
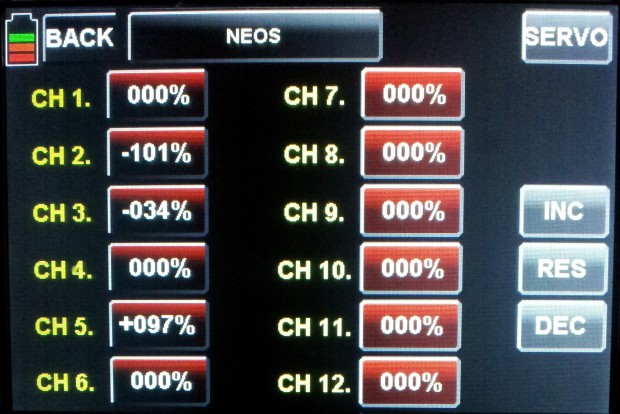
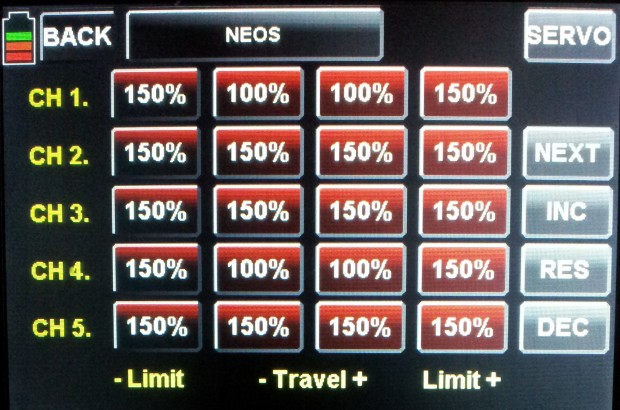
在“BASE”主界面选择“REV/Delay”,调整各舵机正反向与控制延时,可根据需要进行具体调整。完成各舵机正反向调整后进入“Sub-Trim”进行舵机中立点回中,此时调节各舵面归零。接下来进入“E.P.A”对舵机行程进行调整,可根据模型滑翔机的设计者及厂家给出的设定数据进行具体调整,为使后续飞行模式、空气刹车的设定尽量简单,应当调节各副翼、襟翼舵面上下行程量一致。上述设定完成后,需要再次对舵机正反向及舵面行程设定数据进行检查,以防出现低级错误。
此外,使用者可根据自己的需要对微调步进量在“Trim Step”中进行设置,同时可在“Timer”界面进行飞行计时功能的设置。通常来讲,模型失控的现象发生概率极低,为确保万一,使用者可在“Fail Safe”界面对失控发生时的各个舵面位置进行设置,通常将滑翔机设定为半刹车模式,尽量减少其落地时的损伤。


进行完基本设置后,将进行各个飞行模式的深入设置。
二、模型滑翔机飞行模式设置
飞行模式的各个设置在“FUNCTION”界面下进行,包含飞行模式的定义、双重比率及指数、不同飞行模式舵面偏移量、空气刹车等数据的设置。

首先进行各飞行模式的定义,该定义在“Q.Link”中进行,可最多支持6种飞行模式的设定。进入“Q.Link”页面后,“NORMAL”为初始普通模式,不可更改,其余5个飞行模式均可自行定义。以“Q.link1”为例,点击“Q.Link1”,选中后点击右侧的“NAM”按钮可对其进行重新命名,可设置为任意英文及数字组合。接下来点击“CTRL”下的“NULL”按钮可对模式控制开关进行定义,选中“NULL”后,使用者再拨动拟设定的任意开关或摇杆、滑轮,此时会自动选定该控制击发器,并自动进入该开关的设定界面,此时使用者可以对该开关的指令进行调整。
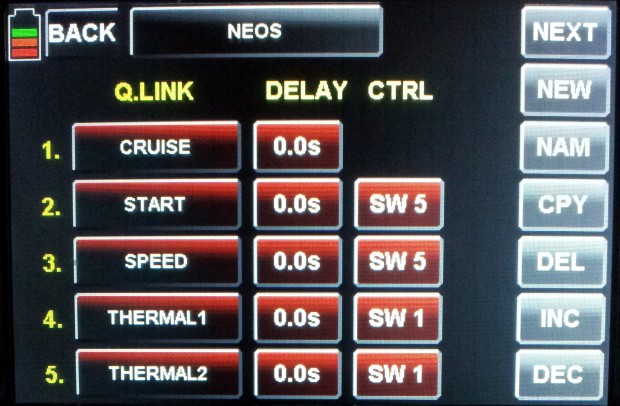
对于大多数滑翔机,通常需要使用至少4个飞行模式,包含起飞、速度、热气流、空气刹车,因此使用者应在“Q.Link”中对以上飞行模式逐个进行定义,对于有特殊需求的使用者可定义至5-6个。
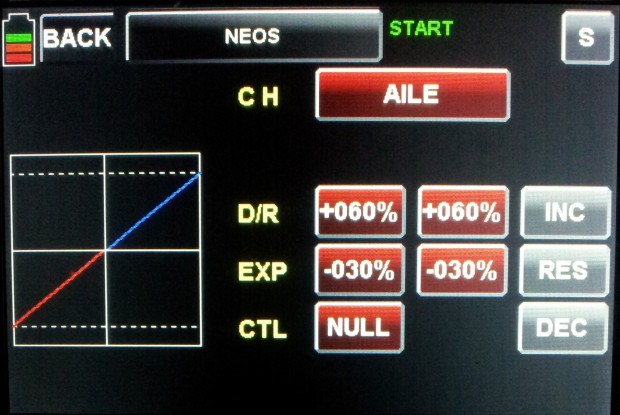
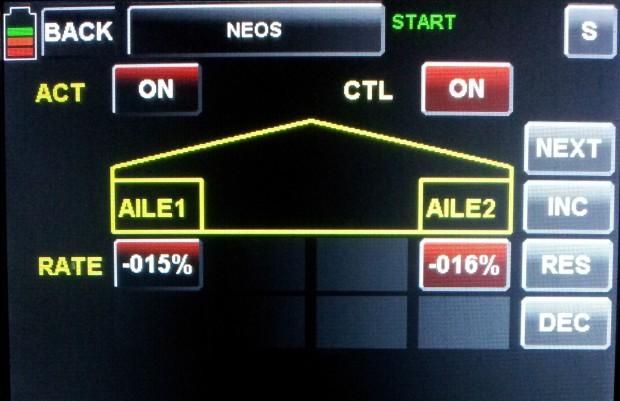
完成飞行模式的定义后,进行各舵面控制比率及指数设定。进入“D/R,EXP”后,可通过点击“CH”后的按钮对各个舵面进行切换。每个飞行模式下的“D/R,EXP”数据均是独立的,当用设定的开关进行飞行模式切换时,可对各项数据进行分模式设置,可适应不同飞行模式下的舵量要求。若使用者想使用其他开关进行各数据的切换,亦可以通过点击“CTL”后的按钮进行开关重新定义,避开飞行模式开关的控制。
接下来进行各飞行模式的舵面偏移量设置,对于不同飞行模式,通常使用者会根据设计及使用需要对各个舵面进行适当的调整。可通过“Flap sett”对襟副翼及升降舵的偏移量进行设定。进入该界面后,首先需要切换不同模式并将“ACT”后的“INH”激活为“ON”。激活后即可对各个舵面偏移量进行不同设定。首先进行副翼偏移量的设定,可根据舵面实际需要进行设置,设置完成后在当前飞行模式下点击右侧“NEXT”按钮进入升降舵偏移量的设定,完成上述两项设定后再切换飞行模式进入下一模式的另行设定。对于“2A”副翼模式的滑翔机,空气刹车可在该界面中直接设定,有更高需求的可通过“FUNCTION”主界面下的“Butterfly”进行进一步设定。

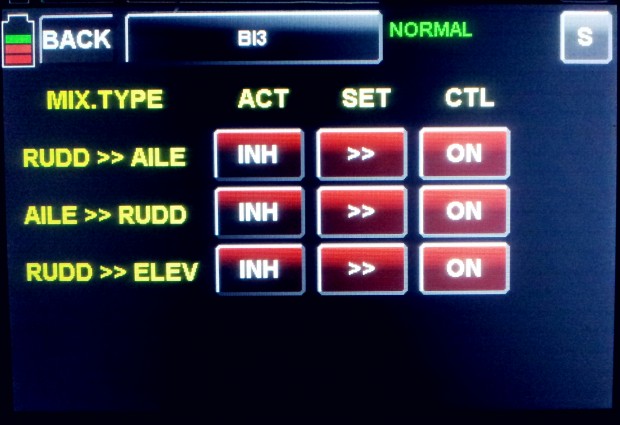
进行完舵面偏移量设定后,如有其它混控需要的使用者,可进入“Wing MIX”界面,进行“RUDD》AILE”、“AILE》RUDD”、“RUDD》ELEV”等混控的设置。如果还有更高要求,可通过“Prog.MIX”进行程序混控的设定,该混控可进行线性编程,具体设置步骤请参考说明书。
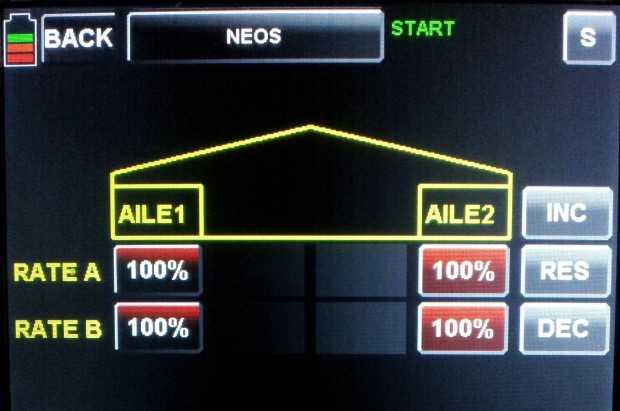
对于滑翔机爱好者来说,副翼差动控制是实现平滑转弯的一项重要设定,此设定在“Aile diff”中进行,使用者可根据需要对控制副翼时的左右副翼行程比率进行设定。
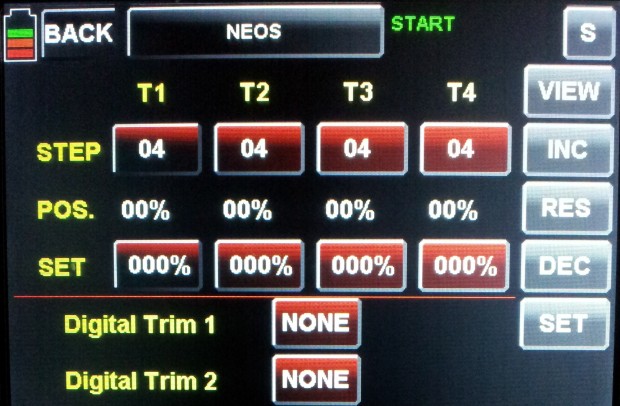
除此之外,各个飞行模式的微调也可进行独立设定,使用者只需在“BASE”主界面下的“CH Set”中,点击右上角的“T:CO”切换为“T:SE”,即开启各飞行模式独立微调控制。
三、遥测功能设置及电脑端软件的使用
该遥控系统的遥测功能可谓一大亮点,其不仅在于实时数据的回传,同样遥控器可以实时播报及电脑软件的后续读取。无需外置传感器的基本遥测数据包括接收机工作电压及温度,其他遥测数据则需要通过搭载传感器进行测定。通过点击主界面右下角的蓝色“T”图标可进入各项遥测数据的读取页面,在未搭载传感器的情况下可以看到接收机工作电压及温度,以及发射信号品质与延迟。
对于遥控模型滑翔机来说,使用较多的传感器是“VARIO”传感器,该传感器提供飞行高度、升降率的测定和读取。该传感器的搭载需要按照以下流程进行,在当前绑定且通电正常的接收机上找到标有“-+T”的插口,将该传感器按照对应正负极插入,然后关闭遥控器,重新对接收机通电,然后打开遥控器,此时完成该传感器的识别及校准,高度零点的校准以每次接收机通电时传感器所处高度为准。

传感器搭载完成后,再度进入“T”回传数据界面,点击左上角“NEXT”按钮即可进入“VARIO”数据界面,可以实时查看高度及升降率数据,该数据尤其对于F3K、F3B、P5B等留空竞时项目的训练和寻找上升气流的训练有极大帮助。
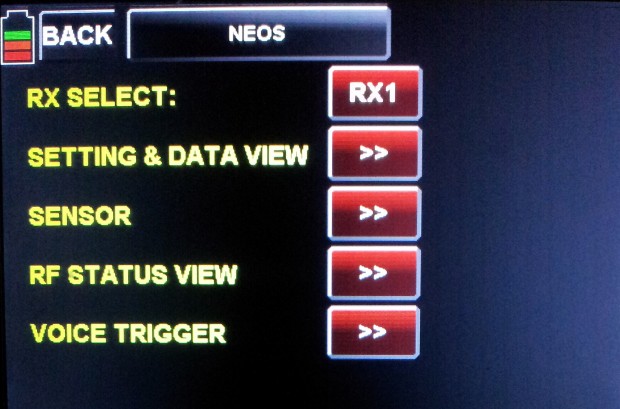
作为本遥控系统的一大亮点,传感器数据与飞行时间的实时英文播报同样具有极大的好处。在“FUNCTION”主界面下的“Telemetry”可进行该功能的设置,进入后点击“VOICE TRIGGER”,可看到“VARIO”点击后面的按钮可以对播报功能的开启进行开关设定,设定好后可进入“VARIO MOD”对播报内容进行选择,其中包含实时高度、最高高度、最低高度。通过“REPEAT”后的时间设定,可以对播报重复时间进行调整。设定完成后,可拨动开关进行测试。


每次飞行的所有数据都将记录在遥控器的SD卡中,使用者可以在飞行完毕后在电脑上的软件进行这些数据的查看和回放,按照以下步骤进行。下载并安装“Firmware_Upgrade_grStudio”软件后,将SD卡与电脑连接。打开上述软件,找到界面左侧的“File Log View”,双击该按钮出现“Log View”界面,然后点击“File Browse”载入SD卡中存储的飞行数据。飞行数据存储在SD卡中的“LogData”文件夹内,找到要查看的模型选择对应时间的“.bin”文件,载入后即可读取当次飞行的数据。
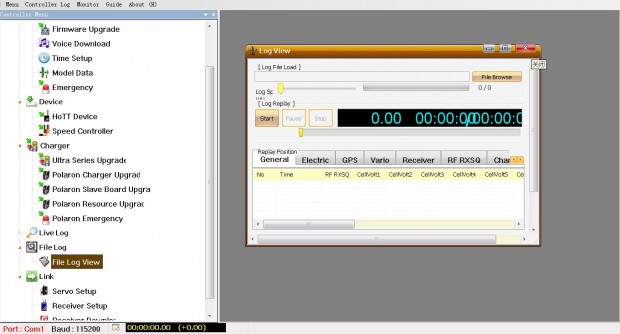
这些数据包括“VARIO”数据、接收机电压的变化数据、通道输出信号的变化数据等。
除此之外,可以在飞行时通过USB线将遥控器与电脑相连,或利用蓝牙模块将遥控器与平板电脑、手机相连,在各上位机上实时读取飞行数据,具体设定请参见说明书。
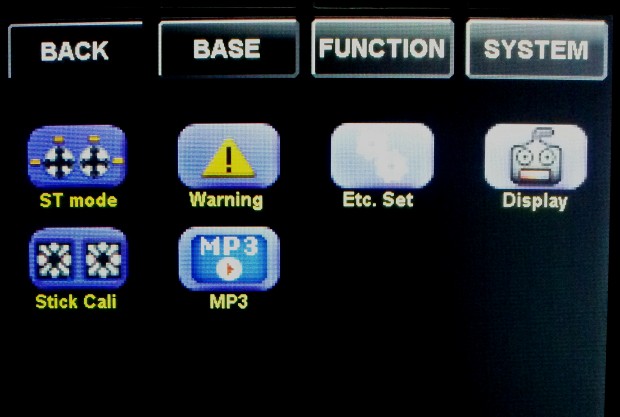
以上是模型设置功能的主要介绍,对于遥控器其他系统设置,使用者可在“SYSTEM”中自行设置,设置过程在此不再赘述。
版权所有,转载请注明!
